简介
STM32WB55的flash擦除有两种机制,一种是只有单核运行下的flash擦除,这种模式下,flash擦除的步骤同其他STM32的flash擦除一样,直接调用HAL库中flash擦除的库函数即可;另一种是双核运行下的flash擦除,这种模式下,因为两颗CPU内核都会访问地址总线,可能会有访问冲突,为了解决这个问题,ST引入了硬件信号量机制,因此,在双核运行下,即当单片机执行BLE应用时,要想擦除flash,就要结合硬件信号量来综合处理,执行步骤比单核下要复杂的多,今天我们就来解析一下双核flash擦除驱动是怎样运行的。
准备变量
在APP_BLE_Init函数中,我们在BLE服务初始化之后,广播启动之前,添加如下代码
/******************** START FLASH TEST SPECIFIC INITIALIZATION *************************/
NbrOfSectorToBeErased = CFG_NBR_OF_FLASH_SECTOR_TO_PROCESS;
NbrOfDataToBeWritten = CFG_NBR_OF_FLASH_SECTOR_TO_PROCESS * 512;
FlashProcessStatus = FLASH_PROCESS_FINISHED;
FlashOperationReq = FLASH_ERASE_REQ;
UTIL_SEQ_RegTask(1 << CFG_TASK_FLASH_OPERATION_REQ_ID, UTIL_SEQ_RFU, FlashOperationProc);
/* Select which mechanism is used by CPU2 to protect its timing versus flash operation */
SHCI_C2_SetFlashActivityControl(FLASH_ACTIVITY_CONTROL_SEM7);
/**
* The error flag shall be cleared before moving forward
*/
__HAL_FLASH_CLEAR_FLAG(FLASH_FLAG_OPTVERR);
/******************** END FLASH TEST SPECIFIC INITIALIZATION ***************************/
变量定义如下
uint32_t NbrOfSectorToBeErased;
uint32_t NbrOfDataToBeWritten;
typedef enum
{
FLASH_PROCESS_FINISHED,
FLASH_PROCESS_STARTED,
}FlashProcessStatus_t;
typedef enum
{
FLASH_ERASE_REQ,
FLASH_WRITE_REQ,
}FlashOperationReq_t;
#define CFG_NBR_OF_FLASH_SECTOR_TO_PROCESS (1)
- NbrOfSectorToBeErased直接赋值为一个宏,表示本次要处理的flash扇区个数,STM32WB55的flash每4K字节构成一个扇区,整个扇区的分布在参考手册中
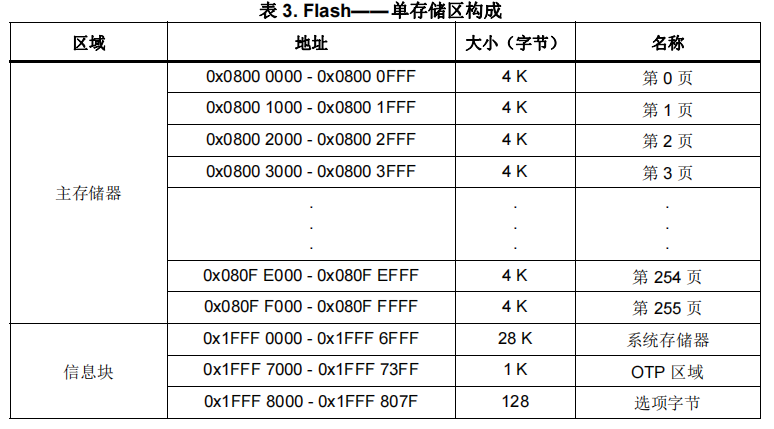
由于flash的擦除只能按扇区擦,即当我们要向flash写入新数据时,首先要擦除一个4K字节扇区,然后才能向这个已经擦除成功的扇区内写入数据。
-
NbrOfDataToBeWritten表示本次要写入的数据的个数,注意STM32WB55写入数据时,必须以双字格式写入,即数据的最小写入单位是64bit,用字节表示的话,就是一次性要写入4个字节,因此这个变量表示的含义,是64bit的数据的个数,而非字节个数,这一点非常重要,因此如果要写满一个扇区,则需要写满 4096 / 8 = 512 个字节。我们一般是定义一个uint64_t的数组,然后将要写入的数据拼接成每4个字节一组,填充进该数组,然后将该数组的元素一个一个写进flash。
-
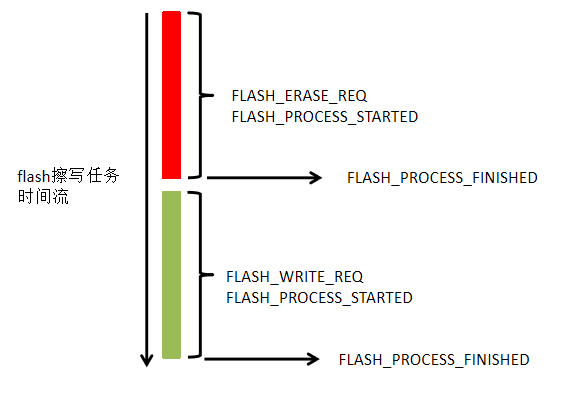
FlashProcessStatus 表示flash擦写任务的执行结果,在双核系统运用中,我们专门启动一个后台任务来处理flash事务,这个任务执行一次,并不能保证flash擦写完全成功,因为在任务执行时,需要获取硬件信号量,如果暂时获取不到,任务就会先结束(不阻塞等待),并且返回FLASH_PROCESS_STARTED,表示这个任务的擦写操作还未完成,之后任务会被调度器重新启动,重新启动后的任务根据这个标志判断是要继续擦写flash。
-
FlashOperationReq 表示任务执行的阶段,因为我们让擦除和写入操作都由同一个任务完成,那这个任务某一阶段到底是要运行擦除函数还是运行写入函数,就是靠这个变量做区分的。
FlashProcessStatus和FlashOperationReq的作用,可以用如下这个图来表示:
-
系统中注册一个任务FlashOperationProc,用来专门负责flash区域数据的更新
-
SHCI_C2_SetFlashActivityControl(FLASH_ACTIVITY_CONTROL_SEM7);
这个函数在shci.h文件中有解释
/** * SHCI_C2_SetFlashActivityControl * @brief Set the mechanism to be used on CPU2 to prevent the CPU1 to either write or erase in flash * * @param Source: It can be one of the following list * - FLASH_ACTIVITY_CONTROL_PES : The CPU2 set the PES bit to prevent the CPU1 to either read or write in flash * - FLASH_ACTIVITY_CONTROL_SEM7 : The CPU2 gets the semaphore 7 to prevent the CPU1 to either read or write in flash. * This requires the CPU1 to first get semaphore 7 before erasing or writing the flash. * * @retval Status */意思就是说通过该函数,让CPU2使用bit位还是使用信号量7来阻止CPU1对flash的读写。
-
__HAL_FLASH_CLEAR_FLAG(FLASH_FLAG_OPTVERR);
这句代码清空了FLASH由于上电可能导致的错误状态位,保证后面关于flash的HAL库函数能够正常运行,建议每次在处理有关flash的应用之前都调用这句代码对错误状态位清理一下
flash擦写任务
这几句代码理解完成后,我们接下来看执行flash擦写的专用任务函数FlashOperationProc
void FlashOperationProc(void)
这个FlashOperationProc任务,是官方给我们提供的现成可用的flash擦写任务,我们直接将这个任务函数添加到应用中即可,有关于该任务执行的步骤,我已经在代码中添加了注释,供大家参考,这里我带大家看一些关键点
首先,整个任务大的框架就是一个if,一个else,通过判断FlashOperationReq变量是FLASH_ERASE_REQ还是FLASH_WRITE_REQ来确定执行擦除还是写入,这个我们在分析FlashOperationReq变量的作用时已经说过了。
代码
first_secure_sector_idx = (READ_BIT(FLASH->SFR, FLASH_SFR_SFSA) >> FLASH_SFR_SFSA_Pos);
这里涉及一个flash寄存器,内容如下
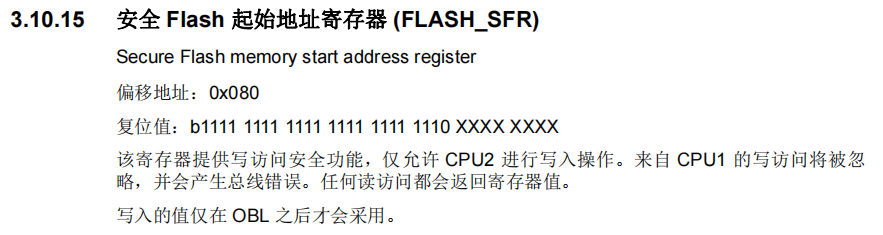

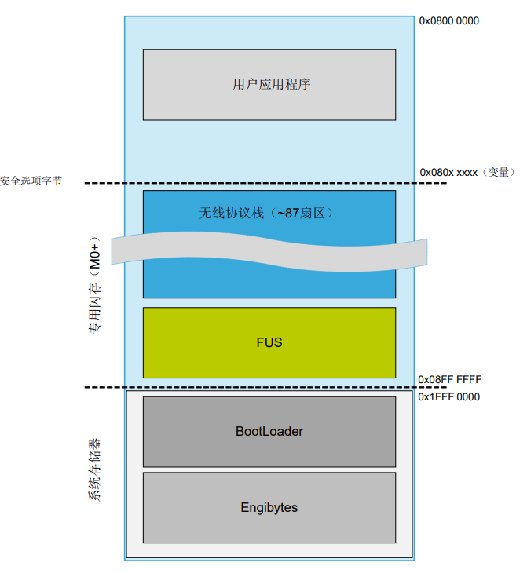
STM32WB的主存储区(见上图flash划分)可以简单的分为两类,一类安全flash,专门存放BLE协议栈,一般处于主存储区的尾部,用户无法访问,另一类非安全flash,存放应用程序,放到主存储区的前面,用户可以访问,因此如果要向flash中写入数据,我们不仅要避开应用程序占用的flash区域,也要避开安全flash区域,这样安全flash的存储起始边界就很重要。官方的参考例程,是将要擦写的flash扇区放到安全flash前面,这样就能保证这块flash是空闲可用的,当然擦写的时候,不能超过扇区的大小,否则会碰到安全flash区域。我们可以通过下图直观的看到flash划分。
STM32WB不同系列flash大小不一样,安全flash的边界也不一样,我们可以通过读取FLASH->SFSA寄存器来获取安全flash的起始地址,以此来确定与应用程序的边界,获取到安全flash的起始地址后,我们往前让出几个扇区,然后把数据写入到这个扇区就行了。注意我们从这个寄存器中读到的数值,并不是直接可用的地址,而是该地址所在的扇区页的编号,例如我们读取flash为1MB的芯片,读到的值为CE,表示安全flash是从第CE(206)个扇区开始的。这样,变量first_secure_sector_idx就存放了安全flash扇区的起始编号。
接下来,将FlashProcessStatus变量值转成FLASH_PROCESS_STARTED,表示flash任务正在运行。
代码
NbrOfSectorToBeErased = FD_EraseSectors(first_secure_sector_idx - CFG_OFFSET_OF_FLASH_SECTOR_TO_PROCESS, NbrOfSectorToBeErased);
通过调用驱动函数FD_EraseSectors擦除指定的扇区,函数的第一个入口参数为要擦除的起始扇区的编号,这里我们把first_secure_sector_idx减去我们想要往前让出的扇区的个数,就是我们要擦除的扇区的编号,我们设置为4,从安全flash边界往前让出4个扇区进行擦除,第二个入口参数为要擦除的扇区的个数,我们设置为1,让其擦除一个扇区即可。
#define CFG_OFFSET_OF_FLASH_SECTOR_TO_PROCESS (4)
我们先不进FD_EraseSectors函数内部,先知道这个函数有个返回值,返回的是还没有被擦除的扇区的个数,只要返回值不是0,就说明还有扇区没有擦除完,如果是这样,则进代码
/**
* There are still sectors to be erased
* Request the background to run one more time the task
*/
UTIL_SEQ_SetTask( 1<<CFG_TASK_FLASH_OPERATION_REQ_ID, CFG_SCH_PRIO_0);
return;
退出当前任务 ,重新激活当前任务,交由调度器重新调度,下次任务执行时继续擦除。
如果返回值为0,则进代码if(NbrOfSectorToBeErased == 0)中,变量值修改
FlashOperationReq = FLASH_WRITE_REQ;
FlashProcessStatus = FLASH_PROCESS_FINISHED;
NbrOfSectorToBeErased = CFG_NBR_OF_FLASH_SECTOR_TO_PROCESS;
其中FlashOperationReq修改,表示当前擦操作已经完成,接下来任务执行时,可以执行写操作。FlashProcessStatus修改,表示当前的flash擦除操作已经完成了,NbrOfSectorToBeErased值恢复为初始值,为后面任务再次被调用执行擦除时做准备。
接下来,进入for循环,执行代码
p_data_flash = (uint64_t*)(FLASH_BASE + ((loop1 + first_secure_sector_idx - CFG_OFFSET_OF_FLASH_SECTOR_TO_PROCESS)*FLASH_SECTOR_SIZE*1024));
表示从我们刚才擦除的地址开始读取数据,看是不是都擦写成了0xFF(flash被擦除后的数据就是0xFF),通过(loop1 + first_secure_sector_idx - CFG_OFFSET_OF_FLASH_SECTOR_TO_PROCESS)来计算扇区下标,然后乘上FLASH_SECTOR_SIZE*1024即扇区下标对应的实际地址。
#define FLASH_SECTOR_SIZE (4) /* a sector on stm32wb55xx is 4K bytes */
p_data_flash将存放要检查的扇区的起始地址,循环 for(loop2 = 0; loop2 < (FLASH_SECTOR_SIZE 128); loop2++) 表示从当前这个p_data_flash地址开始,以双字(8个字节)为单位检查数据,扇区大小为4 * 1K,1K下有128个双字,那么4K下就有4 128个双字,即一个扇区下要检查的双字个数,这样就确定好了循环次数,然后以64bit地址递增读取双字并判断即可。
然后我们看FlashOperationProc任务中,有关写入数据的操作
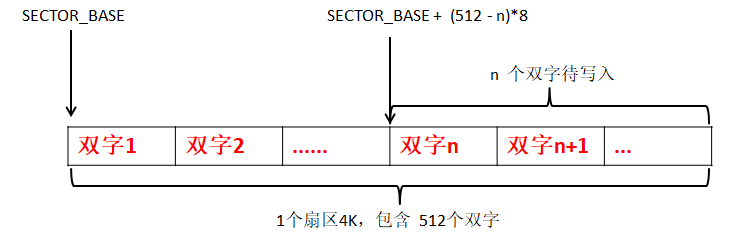
NbrOfDataToBeWritten = FD_WriteData(FLASH_BASE
+ ((first_secure_sector_idx - CFG_OFFSET_OF_FLASH_SECTOR_TO_PROCESS)*FLASH_SECTOR_SIZE*1024)
+ (((CFG_NBR_OF_FLASH_SECTOR_TO_PROCESS*512) - NbrOfDataToBeWritten)*8),
FlashDataToWriteTab + (CFG_NBR_OF_FLASH_SECTOR_TO_PROCESS*512) - NbrOfDataToBeWritten,
NbrOfDataToBeWritten);
任务调用驱动函数FD_WriteData来实现数据的写入(写入数据前必须保证FLASH扇区已经被擦除),同样,我们先不进FD_WriteData函数里面查看细节,只要知道它用来写入数据就行,它的返回值是剩余的未写入的数据个数,这里的数据个数是以双字为单位的。函数的第一个入口参数是要写入的数据的目标地址,第二个入口参数是数据的源地址,第三个是要写入的数据个数,同样以双字为单位,我们来分析这个公式
FLASH_BASE + ((first_secure_sector_idx - CFG_OFFSET_OF_FLASH_SECTOR_TO_PROCESS)*FLASH_SECTOR_SIZE*1024)
+ (((CFG_NBR_OF_FLASH_SECTOR_TO_PROCESS*512) - NbrOfDataToBeWritten)*8)
((first_secure_sector_idx - CFG_OFFSET_OF_FLASH_SECTOR_TO_PROCESS) * FLASH_SECTOR_SIZE * 1024)得到的是要写入的扇区首地址,(CFG_NBR_OF_FLASH_SECTOR_TO_PROCESS*512)表示要处理的扇区里面双字单元的个数,这个数减去现在准备要写入的数据个数,再乘上8就是当前要写的数据的目标地址,这里的NbrOfDataToBeWritten有两层含义,一层表示本次准备要写入的数据个数,一层代表上次还有多少未写入,其实意思是一样的,归根结底还是因为我们的任务不能一次性将所有数据写入完成,任务需要执行很多次,这样上次未写完的数据个数,就自然而然成为本次准备要写入的数据个数了。我们通过下面这个图就能很好的理解地址为什么这么算了。
数据的源地址计算也是同样的道理,只不过这里我们每写完一个双字,指针往后递增一下就可以了。
代码
for(loop1 = 0; loop1 < (CFG_NBR_OF_FLASH_SECTOR_TO_PROCESS*512); loop1++)
循环读取刚才写入的数据是否与源数据相等,验证写入过程,如果FD_WriteData的返回值不为0,则退出当前任务,并且激活任务,让调度器重新调度,继续写入过程,这跟擦除是一样的。
至此,我们的flash擦写任务代码分析完毕,我们做个总结:
- 这个任务被调度后,执行完毕并不一定完全擦除或者完全写入数据,它会根据驱动函数的返回值,重新启动自身,让调度器重新调度自己,重新尝试擦写
- 这个任务有两个关键变量,一个变量负责该任务本次做擦除还是写入,一个变量负责该任务继续之前的擦除或者写入,还是可以进入到下一个阶段。
驱动函数
好,接下来我们分析刚才漏掉的两个驱动函数,这两个函数在官方的驱动文件flash_driver.c文件中,先看擦除
/**
* @brief Implements the Dual core algorithm to erase multiple sectors in flash with CPU1
* It calls for each sector to be erased the API FD_EraseSingleSector()
*
* @param FirstSector: The first sector to be erased
* This parameter must be a value between 0 and (SFSA - 1)
* @param NbrOfSectors: The number of sectors to erase
* This parameter must be a value between 1 and (SFSA - FirstSector)
* @retval Number of sectors not erased:
* Depending on the implementation of FD_WaitForSemAvailable(),
* it may still have some sectors not erased when the timing protection has been
* enabled by either CPU1 or CPU2. When the value returned is not 0, the application
* should wait until both timing protection before retrying to erase the last missing sectors.
*
* In addition, When the returned value is not 0:
* - The Sem2 is NOT released
* - The FLASH is NOT locked
* - SHCI_C2_FLASH_EraseActivity(ERASE_ACTIVITY_OFF) is NOT called
* It is expected that the user will call one more time this function to finish the process
*/
uint32_t FD_EraseSectors(uint32_t FirstSector, uint32_t NbrOfSectors);
在flash_driver.h文件中,有该函数的详细描述,这个函数专门用来在双核系统中执行多个扇区的擦除,第一个入口参数是第一个要被擦除的扇区的编号,第二个入口参数是要擦除的扇区的个数,返回值为还未擦除的扇区的个数,由于时序保护机制,所有的扇区并非可以在一个连续的时间段内完全擦除,因此当返回值非0时,应用程序需要等待定时保护结束再重新尝试擦除。函数内部通过变量single_flash_operation_status来确定扇区是否擦除成功,如果不成功,则修改对应的返回值,返回该函数,下次重新尝试。关键代码
/**
* Take the semaphore to take ownership of the Flash IP
*/
while(LL_HSEM_1StepLock(HSEM, CFG_HW_FLASH_SEMID));
HAL_FLASH_Unlock();
/**
* Notify the CPU2 that some flash erase activity may be executed
* On reception of this command, the CPU2 enables the BLE timing protection versus flash erase processing
* The Erase flash activity will be executed only when the BLE RF is idle for at least 25ms
* The CPU2 will prevent all flash activity (write or erase) in all cases when the BL RF Idle is shorter than 25ms.
*/
SHCI_C2_FLASH_EraseActivity(ERASE_ACTIVITY_ON);
通过获取信号量来获取对flash的操作权,并且解锁flash,并通过shci指令向CPU2发送一个指令,通知CPU2 flash擦除操作将要执行,当CPU2接收到这个指令,它使能基于flash擦除的BLE时序保护处理机制,这种机制使得只有当 BLE RF 闲置至少 25ms 时,才会执行擦除闪存活动,当 BL RF 空闲时间短于 25 ms时,CPU2 在任何情况下都会阻止所有闪存活动(写入或擦除)。
接下来,调用循环体,循环擦除每个扇区
for(loop_flash = 0; (loop_flash < NbrOfSectors) && (single_flash_operation_status == SINGLE_FLASH_OPERATION_DONE) ; loop_flash++)
{
single_flash_operation_status = FD_EraseSingleSector(FirstSector+loop_flash);
}
循环体的截止条件除了扇区个数外,还有单次扇区擦除的结果状态,如果某个扇区擦除的状态为无效,则结束这个循环。之后通过代码
if(single_flash_operation_status != SINGLE_FLASH_OPERATION_DONE)
{
return_value = NbrOfSectors - loop_flash + 1;
}
else
{
/**
* Notify the CPU2 there will be no request anymore to erase the flash
* On reception of this command, the CPU2 will disables the BLE timing protection versus flash erase processing
* The protection is active until next end of radio event.
*/
SHCI_C2_FLASH_EraseActivity(ERASE_ACTIVITY_OFF);
HAL_FLASH_Lock();
/**
* Release the ownership of the Flash IP
*/
LL_HSEM_ReleaseLock(HSEM, CFG_HW_FLASH_SEMID, 0);
return_value = 0;
}
返回还有多少个扇区未擦除,注意由于for循环,loop_flash至少会加1,因此这里有一个NbrOfSectors - loop_flash + 1的操作,总之return_value一定表示有多少个扇区没有处理完毕,如果当前要擦除的这个扇区没有处理完毕,也要算到没有处理的扇区里面。如果能够正常完成for循环,说明给定的扇区已经全部擦除完成,此时向CPU2 发送shci指令,告知擦除操作已经完成,CPU2于是禁用flash擦除相对应的时序保护,时序保护将持续到下一次RADIO事件结束。然后是FLASH上锁,释放flash使用信号量,这跟上面的操作是对称的。
接下来看单一扇区擦除函数,这个函数的入口参数只有一个,即需要擦除的扇区编号
/**
* @brief Implements the Dual core algorithm to erase one sector in flash with CPU1
*
* It expects the following point before calling this API:
* - The Sem2 is taken
* - The FLASH is unlocked
* - SHCI_C2_FLASH_EraseActivity(ERASE_ACTIVITY_ON) has been called
* It expects the following point to be done when no more sectors need to be erased
* - The Sem2 is released
* - The FLASH is locked
* - SHCI_C2_FLASH_EraseActivity(ERASE_ACTIVITY_OFF) is called
*
* The two point above are implemented in FD_EraseSectors()
* This API needs to be used instead of FD_EraseSectors() in case a provided library is taking
* care of these two points and request only a single operation.
*
* @param FirstSector: The sector to be erased
* This parameter must be a value between 0 and (SFSA - 1)
* @retval: SINGLE_FLASH_OPERATION_DONE -> The data has been written
* SINGLE_FLASH_OPERATION_NOT_EXECUTED -> The data has not been written due to timing protection
* from either CPU1 or CPU2. On a failure status, the user should check
* both timing protection before retrying.
*/
SingleFlashOperationStatus_t FD_EraseSingleSector(uint32_t SectorNumber);
函数的注释中写的很清楚,在调用这个函数前,需要获取flash信号量,flash解锁,通知CPU2 flash擦除要执行,结束这个函数调用后,使用对称的操作。函数的返回值是擦除的状态,成功或失败,失败是因为时序保护机制导致的。函数内部代码如下,注释写的很清楚,它做了一个小的等待后,直接调用函数ProcessSingleFlashOperation,这个函数很重要,负责 擦写 ,第一个入口参数表示是擦除操作还是写入操作,第二个参数代表本次操作的扇区编号,第三个入口参数为0时无意义。我们接下来就到这个函数里面一探究竟。
SingleFlashOperationStatus_t FD_EraseSingleSector(uint32_t SectorNumber)
{
SingleFlashOperationStatus_t return_value;
/* Add at least 5us (CPU1 up to 64MHz) to guarantee that CPU2 can take SEM7 to protect BLE timing */
for (volatile uint32_t i = 0; i < 35; i++);
/* The last parameter is unused in that case and set to 0 */
return_value = ProcessSingleFlashOperation(FLASH_ERASE, SectorNumber, 0);
return return_value;
}
代码如下:
static SingleFlashOperationStatus_t ProcessSingleFlashOperation(FlashOperationType_t FlashOperationType,
uint32_t SectorNumberOrDestAddress,
uint64_t Data)
这个函数是一个局部函数,没有头文件介绍,我们直接看内部执行流程,首先是局部变量
SemStatus_t cpu1_sem_status;
SemStatus_t cpu2_sem_status;
WaitedSemStatus_t waited_sem_status;
SingleFlashOperationStatus_t return_status;
uint32_t page_error;
FLASH_EraseInitTypeDef p_erase_init;
waited_sem_status = WAITED_SEM_FREE;
p_erase_init.TypeErase = FLASH_TYPEERASE_PAGES;
p_erase_init.NbPages = 1;
p_erase_init.Page = SectorNumberOrDestAddress;
两个硬件信号量状态cpu1_sem_status和cpu2_sem_status用来表示是否时序保护机制允许flash操作,等待状态waited_sem_status表示当时序保护机制阻止flash操作时应该如何处理。page_error将被HAL库函数使用,p_erase_init是HAL库函数调用时需要的入口结构体。我们还是按先全局,后局部的流程看这个函数。
接着代码
do
{
/**
* When the PESD bit mechanism is used by CPU2 to protect its timing, the PESD bit should be polled here.
* If the PESD is set, the CPU1 will be stalled when reading literals from an ISR that may occur after
* the flash processing has been requested but suspended due to the PESD bit.
*
* Note: This code is required only when the PESD mechanism is used to protect the CPU2 timing.
* However, keeping that code make it compatible with the two mechanisms.
*/
while(LL_FLASH_IsActiveFlag_OperationSuspended());
UTILS_ENTER_CRITICAL_SECTION();
/**
* Depending on the application implementation, in case a multitasking is possible with an OS,
* it should be checked here if another task in the application disallowed flash processing to protect
* some latency in critical code execution
* When flash processing is ongoing, the CPU cannot access the flash anymore.
* Trying to access the flash during that time stalls the CPU.
* The only way for CPU1 to disallow flash processing is to take CFG_HW_BLOCK_FLASH_REQ_BY_CPU1_SEMID.
*/
cpu1_sem_status = (SemStatus_t)LL_HSEM_GetStatus(HSEM, CFG_HW_BLOCK_FLASH_REQ_BY_CPU1_SEMID);
if(cpu1_sem_status == SEM_LOCK_SUCCESSFUL)
{
/**
* Check now if the CPU2 disallows flash processing to protect its timing.
* If the semaphore is locked, the CPU2 does not allow flash processing
*
* Note: By default, the CPU2 uses the PESD mechanism to protect its timing,
* therefore, it is useless to get/release the semaphore.
*
* However, keeping that code make it compatible with the two mechanisms.
* The protection by semaphore is enabled on CPU2 side with the command SHCI_C2_SetFlashActivityControl()
*
*/
cpu2_sem_status = (SemStatus_t)LL_HSEM_1StepLock(HSEM, CFG_HW_BLOCK_FLASH_REQ_BY_CPU2_SEMID);
if(cpu2_sem_status == SEM_LOCK_SUCCESSFUL)
{
/**
* When CFG_HW_BLOCK_FLASH_REQ_BY_CPU2_SEMID is taken, it is allowed to only erase one sector or
* write one single 64bits data
* When either several sectors need to be erased or several 64bits data need to be written,
* the application shall first exit from the critical section and try again.
*/
if(FlashOperationType == FLASH_ERASE)
{
HAL_FLASHEx_Erase(&p_erase_init, &page_error);
}
else
{
HAL_FLASH_Program(FLASH_TYPEPROGRAM_DOUBLEWORD, SectorNumberOrDestAddress, Data);
}
/**
* Release the semaphore to give the opportunity to CPU2 to protect its timing versus the next flash operation
* by taking this semaphore.
* Note that the CPU2 is polling on this semaphore so CPU1 shall release it as fast as possible.
* This is why this code is protected by a critical section.
*/
LL_HSEM_ReleaseLock(HSEM, CFG_HW_BLOCK_FLASH_REQ_BY_CPU2_SEMID, 0);
}
}
UTILS_EXIT_CRITICAL_SECTION();
if(cpu1_sem_status != SEM_LOCK_SUCCESSFUL)
{
/**
* To avoid looping in ProcessSingleFlashOperation(), FD_WaitForSemAvailable() should implement a mechanism to
* continue only when CFG_HW_BLOCK_FLASH_REQ_BY_CPU1_SEMID is free
*/
waited_sem_status = FD_WaitForSemAvailable(WAIT_FOR_SEM_BLOCK_FLASH_REQ_BY_CPU1);
}
else if(cpu2_sem_status != SEM_LOCK_SUCCESSFUL)
{
/**
* To avoid looping in ProcessSingleFlashOperation(), FD_WaitForSemAvailable() should implement a mechanism to
* continue only when CFG_HW_BLOCK_FLASH_REQ_BY_CPU2_SEMID is free
*/
waited_sem_status = FD_WaitForSemAvailable(WAIT_FOR_SEM_BLOCK_FLASH_REQ_BY_CPU2);
}
}
while( ((cpu2_sem_status != SEM_LOCK_SUCCESSFUL) || (cpu1_sem_status != SEM_LOCK_SUCCESSFUL))
&& (waited_sem_status != WAITED_SEM_BUSY) );
这是一个相当大的循环,先执行,轮询PESD位,我们前面有提到过,时序保护有两种方式,一种是使用硬件信号量保护,另一种是通过这个PESD位,这个函数是为了兼容这两种方式,所以这里添加了对PESD位的轮询,这样,如果应用程序选择PESD位来做时序保护,也能直接调用这个函数。在使用PESD位来做时序保护时,如果这个位置置1,则CPU1会停到这里,直到等到PESD位清零再执行下面的flash操作,然后调用UTILS_ENTER_CRITICAL_SECTION代码进入临界段,在多任务操作系统中,要在此处检查是否有其他任务阻止flash操作,当flash处理正在进行时,CPU 不能再访问闪存,在此期间尝试访问flash会导致 CPU 停止运行,
CPU1 禁止闪存处理的唯一方法是采取 CFG_HW_BLOCK_FLASH_REQ_BY_CPU1_SEMID信号量。因此这里调用代码
cpu1_sem_status = (SemStatus_t)LL_HSEM_GetStatus(HSEM, CFG_HW_BLOCK_FLASH_REQ_BY_CPU1_SEMID);
来获取硬件信号量,查看是否有其他任务在执行flash操作,如果这个信号量能拿到,则继续获取CPU2信号量
cpu2_sem_status = (SemStatus_t)LL_HSEM_1StepLock(HSEM, CFG_HW_BLOCK_FLASH_REQ_BY_CPU2_SEMID);
如果这个信号量也能拿到,说明CPU2目前没有做时序保护,可以进行flash操作,要注意,CPU2默认使用的是PESD位来做时序保护,因此最前面的通过shci指令通知CPU2使用硬件信号量作为时序保护方法的代码很重要。
当两个硬件信号量全部获取到,此时可以执行的操作是,擦除一个扇区或者写一个双字数据到flash,如果有更多扇区需要擦除或者更多数据写入,则需要退出当前临界段代码重新进入该函数继续执行。接下来根据传进来的第一个入口参数,决定是擦除还是写数据。
if(FlashOperationType == FLASH_ERASE)
{
HAL_FLASHEx_Erase(&p_erase_init, &page_error);
}
else
{
HAL_FLASH_Program(FLASH_TYPEPROGRAM_DOUBLEWORD, SectorNumberOrDestAddress, Data);
}
这里就直接调用HAL库函数去处理了,我们后面再分析这两个库函数。
接下来
LL_HSEM_ReleaseLock(HSEM, CFG_HW_BLOCK_FLASH_REQ_BY_CPU2_SEMID, 0);
释放CPU2硬件信号量,由于CPU2会轮询这个信号量,因此要尽快释放,使得CPU2有机会执行下一次flash操作时对应的时序保护操作,这也是为什么这段代码处于临界段的原因。
然后退出临界段。
接下来执行判断
if(cpu1_sem_status != SEM_LOCK_SUCCESSFUL)
{
/**
* To avoid looping in ProcessSingleFlashOperation(), FD_WaitForSemAvailable() should implement a mechanism to
* continue only when CFG_HW_BLOCK_FLASH_REQ_BY_CPU1_SEMID is free
*/
waited_sem_status = FD_WaitForSemAvailable(WAIT_FOR_SEM_BLOCK_FLASH_REQ_BY_CPU1);
}
else if(cpu2_sem_status != SEM_LOCK_SUCCESSFUL)
{
/**
* To avoid looping in ProcessSingleFlashOperation(), FD_WaitForSemAvailable() should implement a mechanism to
* continue only when CFG_HW_BLOCK_FLASH_REQ_BY_CPU2_SEMID is free
*/
waited_sem_status = FD_WaitForSemAvailable(WAIT_FOR_SEM_BLOCK_FLASH_REQ_BY_CPU2);
}
函数 FD_WaitForSemAvailable 的内容如下:
__WEAK WaitedSemStatus_t FD_WaitForSemAvailable(WaitedSemId_t WaitedSemId)
{
/**
* The timing protection is enabled by either CPU1 or CPU2. It should be decided here if the driver shall
* keep trying to erase/write the flash until successful or if it shall exit and report to the user that the action
* has not been executed.
* WAITED_SEM_BUSY returns to the user
* WAITED_SEM_FREE keep looping in the driver until the action is executed. This will result in the current stack looping
* until this is done. In a bare metal implementation, only the code within interrupt handler can be executed. With an OS,
* only task with higher priority can be processed
*
*/
return WAITED_SEM_BUSY;
}
这两个判断其实很精妙,其实这个函数FD_WaitForSemAvailable中的内容是可以根据入口参数进行修改的,当我们前面获取信号量失败后,可以通过这个函数,确定既然失败了,是继续往下走,还是循环的检查直至获取到信号量,而且两个信号量到底哪个获取不到,需要循环检查,这些是可以通过FD_WaitForSemAvailable来定制的,比方我们可以将FD_WaitForSemAvailable的内容设置为,获取不到CPU1硬件信号量时,返回WAITED_SEM_FREE,这样可以在CPU1信号量未获取到时继续执行循环,当获取不到CPU2硬件信号量时,返回WAITED_SEM_BUSY,使其退出当前循环。
我们现在看的例程里面FD_WaitForSemAvailable并没有对入口参数进行区分,都是返回WAITED_SEM_BUSY,那就只要两个其中一个获取不到,就退出当前循环。
最后是循环的判断条件
while( ((cpu2_sem_status != SEM_LOCK_SUCCESSFUL) || (cpu1_sem_status != SEM_LOCK_SUCCESSFUL))
&& (waited_sem_status != WAITED_SEM_BUSY) );
只要其中一个信号量没有获取成功,并且FD_WaitForSemAvailable的返回值为WAITED_SEM_FREE,则继续这个循环,我们目前返回值都是BUSY,那自然而然只要有一个信号量获取失败,循环就结束了。
然后是等待FLASH忙标记
while(__HAL_FLASH_GET_FLAG(FLASH_FLAG_CFGBSY));
接着
if(waited_sem_status != WAITED_SEM_BUSY)
{
/**
* The flash processing has been done. It has not been checked whether it has been successful or not.
* The only commitment is that it is possible to request a new flash processing
*/
return_status = SINGLE_FLASH_OPERATION_DONE;
}
else
{
/**
* The flash processing has not been executed due to timing protection from either the CPU1 or the CPU2.
* This status is reported up to the user that should retry after checking that each CPU do not
* protect its timing anymore.
*/
return_status = SINGLE_FLASH_OPERATION_NOT_EXECUTED;
}
由于waited_sem_status初始值为free,如果是busy则一定获取信号量失败,并且循环退出了,因为如果是free,则循环一定会执行,此时busy说明操作没有完成,返回未完成状态,如果是free,则操作完毕,循环结束,返回完成状态。
这是擦除驱动函数,接下来看写入数据驱动函数
/**
* @brief Implements the Dual core algorithm to write multiple 64bits data in flash with CPU1
* The user shall first make sure the location to be written has been first erase.
* Otherwise, the API will loop for ever as it will be not able to write in flash
* The only value that can be written even though the destination is not erased is 0.
* It calls for each 64bits to be written the API FD_WriteSingleData()
*
* @param DestAddress: Address of the flash to write the first data. It shall be 64bits aligned
* @param pSrcBuffer: Address of the buffer holding the 64bits data to be written in flash
* @param NbrOfData: Number of 64bits data to be written
* @retval Number of 64bits data not written:
* Depending on the implementation of FD_WaitForSemAvailable(),
* it may still have 64bits data not written when the timing protection has been
* enabled by either CPU1 or CPU2. When the value returned is not 0, the application
* should wait until both timing protection before retrying to write the last missing 64bits data.
*
* In addition, When the returned value is not 0:
* - The Sem2 is NOT released
* - The FLASH is NOT locked
* It is expected that the user will call one more time this function to finish the process
*/
uint32_t FD_WriteData(uint32_t DestAddress, uint64_t * pSrcBuffer, uint32_t NbrOfData);
注释中提到,要调用这个函数前必须保证扇区已经被擦除,否则这个API将一直循环,未擦除时只能写入数据0,第一个入口参数时要写入的地址,第二个是源数据的地址,第三个是要写入的双字的个数。
进入函数内部,single_flash_operation_status变量作用同擦除驱动函数一样,记录单次flash操作状态,然后是获取信号量,解锁flash,接着调用循环体
for(loop_flash = 0; (loop_flash < NbrOfData) && (single_flash_operation_status == SINGLE_FLASH_OPERATION_DONE) ; loop_flash++)
{
single_flash_operation_status = FD_WriteSingleData(DestAddress+(8*loop_flash), *(pSrcBuffer+loop_flash));
}
这一步也跟擦除一样,循环结束,如果返回值非0,表示的是未写入的双字的个数。
然后调用
/**
* @brief Implements the Dual core algorithm to write one 64bits data in flash with CPU1
* The user shall first make sure the location to be written has been first erase.
* Otherwise, the API will loop for ever as it will be not able to write in flash
* The only value that can be written even though the destination is not erased is 0.
*
* It expects the following point before calling this API:
* - The Sem2 is taken
* - The FLASH is unlocked
* It expects the following point to be done when no more sectors need to be erased
* - The Sem2 is released
* - The FLASH is locked
*
* The two point above are implemented in FD_WriteData()
* This API needs to be used instead of FD_WriteData() in case a provided library is taking
* care of these two points and request only a single operation.
*
* @param DestAddress: Address of the flash to write the data. It shall be 64bits aligned
* @param Data: 64bits Data to be written
* @retval: SINGLE_FLASH_OPERATION_DONE -> The data has been written
* SINGLE_FLASH_OPERATION_NOT_EXECUTED -> The data has not been written due to timing protection
* from either CPU1 or CPU2. On a failure status, the user should check
* both timing protection before retrying.
*/
SingleFlashOperationStatus_t FD_WriteSingleData(uint32_t DestAddress, uint64_t Data);
注意这个函数第一个入口参数传入的是要写入数据的地址,因此在前面的循环体中,因为每次是写入双字,即8个字节,因此每次循环有DestAddress+(8*loop_flash),而pSrcBuffer本身是双字指针,因此只要自身递增就可以,我们看到FD_WriteSingleData第一个入口参数不变,还是数据要写入的地址,第二个入口参数变成了要写入的数据值,这里一定要注意。函数的返回值的含义跟FD_EraseSingleSector是一样的,内容
SingleFlashOperationStatus_t FD_WriteSingleData(uint32_t DestAddress, uint64_t Data)
{
SingleFlashOperationStatus_t return_value;
return_value = ProcessSingleFlashOperation(FLASH_WRITE, DestAddress, Data);
return return_value;
}
这里最终调用ProcessSingleFlashOperation函数,只不过这里传的第一个参数成了FLASH_WRITE,第三个参数不为0了,ProcessSingleFlashOperation前面已经分析过了,这里不再赘述。
HAL库函数
我们接下来看ProcessSingleFlashOperation中的两个库函数,一个用来擦除,擦除时,传入的参数为
HAL_FLASHEx_Erase(&p_erase_init, &page_error);
注意,要擦除的扇区编号已经在前面传给了结构体p_erase_init
p_erase_init.TypeErase = FLASH_TYPEERASE_PAGES;
p_erase_init.NbPages = 1;
p_erase_init.Page = SectorNumberOrDestAddress;
这个函数的内容如下
/**
* @brief Perform an erase of the specified FLASH memory pages.
* @note Before any operation, it is possible to check there is no operation suspended
* by call HAL_FLASHEx_IsOperationSuspended()
* @param[in] pEraseInit Pointer to an @ref FLASH_EraseInitTypeDef structure that
* contains the configuration information for the erasing.
* @param[out] PageError Pointer to variable that contains the configuration
* information on faulty page in case of error (0xFFFFFFFF means that all
* the pages have been correctly erased)
* @retval HAL Status
*/
HAL_StatusTypeDef HAL_FLASHEx_Erase(FLASH_EraseInitTypeDef *pEraseInit, uint32_t *PageError)
{
HAL_StatusTypeDef status;
uint32_t index;
/* Check the parameters */
assert_param(IS_FLASH_TYPEERASE(pEraseInit->TypeErase));
/* Process Locked */
__HAL_LOCK(&pFlash);
/* Reset error code */
pFlash.ErrorCode = HAL_FLASH_ERROR_NONE;
/* Verify that next operation can be proceed */
status = FLASH_WaitForLastOperation(FLASH_TIMEOUT_VALUE);
if (status == HAL_OK)
{
if (pEraseInit->TypeErase == FLASH_TYPEERASE_PAGES)
{
/*Initialization of PageError variable*/
*PageError = 0xFFFFFFFFU;
for (index = pEraseInit->Page; index < (pEraseInit->Page + pEraseInit->NbPages); index++)
{
/* Start erase page */
FLASH_PageErase(index);
/* Wait for last operation to be completed */
status = FLASH_WaitForLastOperation(FLASH_TIMEOUT_VALUE);
if (status != HAL_OK)
{
/* In case of error, stop erase procedure and return the faulty address */
*PageError = index;
break;
}
}
/* If operation is completed or interrupted, disable the Page Erase Bit */
FLASH_AcknowledgePageErase();
}
/* Flush the caches to be sure of the data consistency */
FLASH_FlushCaches();
}
/* Process Unlocked */
__HAL_UNLOCK(&pFlash);
return status;
}
这个函数最终会调用FLASH_PageErase实现扇区的擦除,注意这里擦除时只擦除一个扇区,多个扇区擦除是要循环调用单个扇区擦除的函数的。
写入函数
HAL_FLASH_Program(FLASH_TYPEPROGRAM_DOUBLEWORD, SectorNumberOrDestAddress, Data);
内容也比较简单
/**
* @brief Program double word or fast program of a row at a specified address.
* @note Before any operation, it is possible to check there is no operation suspended
* by call HAL_FLASHEx_IsOperationSuspended()
* @param TypeProgram Indicate the way to program at a specified address
* This parameter can be a value of @ref FLASH_TYPE_PROGRAM
* @param Address Specifies the address to be programmed.
* @param Data Specifies the data to be programmed
* This parameter is the data for the double word program and the address where
* are stored the data for the row fast program.
*
* @retval HAL_StatusTypeDef HAL Status
*/
HAL_StatusTypeDef HAL_FLASH_Program(uint32_t TypeProgram, uint32_t Address, uint64_t Data)
{
HAL_StatusTypeDef status;
/* Check the parameters */
assert_param(IS_FLASH_TYPEPROGRAM(TypeProgram));
assert_param(IS_ADDR_ALIGNED_64BITS(Address));
assert_param(IS_FLASH_PROGRAM_ADDRESS(Address));
/* Process Locked */
__HAL_LOCK(&pFlash);
/* Reset error code */
pFlash.ErrorCode = HAL_FLASH_ERROR_NONE;
/* Verify that next operation can be proceed */
status = FLASH_WaitForLastOperation(FLASH_TIMEOUT_VALUE);
if (status == HAL_OK)
{
if (TypeProgram == FLASH_TYPEPROGRAM_DOUBLEWORD)
{
/* Check the parameters */
assert_param(IS_FLASH_PROGRAM_ADDRESS(Address));
/* Program double-word (64-bit) at a specified address */
FLASH_Program_DoubleWord(Address, Data);
}
else
{
/* Check the parameters */
assert_param(IS_FLASH_FAST_PROGRAM_ADDRESS(Address));
/* Fast program a 64 row double-word (64-bit) at a specified address */
FLASH_Program_Fast(Address, (uint32_t)Data);
}
/* Wait for last operation to be completed */
status = FLASH_WaitForLastOperation(FLASH_TIMEOUT_VALUE);
/* If the program operation is completed, disable the PG or FSTPG Bit */
CLEAR_BIT(FLASH->CR, TypeProgram);
}
/* Process Unlocked */
__HAL_UNLOCK(&pFlash);
/* return status */
return status;
}
结构也同擦除一样,会执行写入一个双字的操作,最终操作的还是寄存器。
至此,我们完成了STM32WB55 双核系统应用下flash擦写代码的解析!
标签:游戏攻略







